New antenna control system for the Ground Station
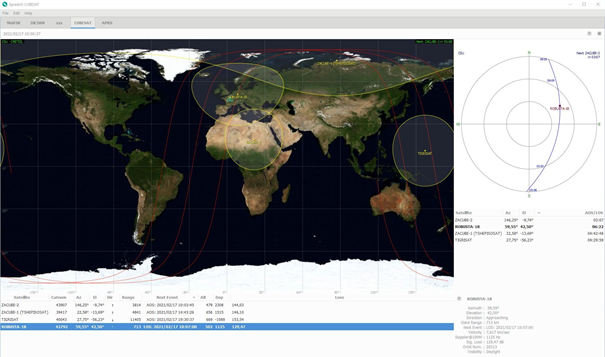
Main screen of GPREDICT (the software we use).
Until now we have only used GPREDICT prediction software to prepare our listening sessions. Namely: Precise time at which a CUBESAT will pass, the duration of its passage (on average 10 minutes), its position in Azimuth and Elevation in relation to the ground station.
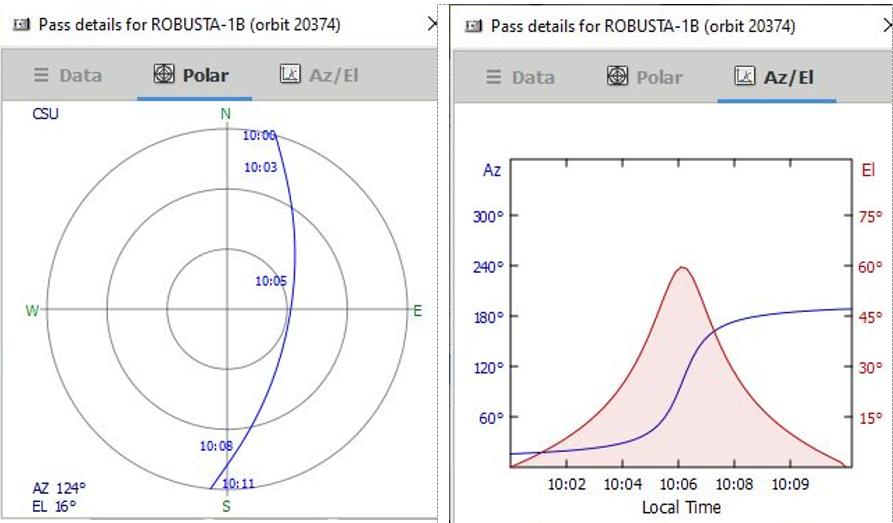
Polar diagram, azimuth angles and elevation for the passage of a CUBESAT
CUBESAT being in low orbit between 400 and 600 km altitude (type of orbit, LEO Low Earth Orbit). They move at exceedingly high speed around 27,500 km / h or 450 km / min or 7.6 km / s. It takes about 90 minutes to rotate around the earth. Usually around an axis perpendicular to the equator. There are about 16 rotations in 24 hours. Each time the passages shift by several thousand km therefore we can get two suitable rotation in 24 hours. A north-south passage near the station, then 12 hours later when the earth has made a U-turn, the same but reversed, namely south-north.

ROBUSTA-1B Passageways.
Conclusion: Only one daytime passage is workable. The time of this passage varies according to the year, morning or noon or evening and changes each day. It is therefore imperative to anticipate this passage.
During the passage and given the strong directivity of our antennas, it is necessary to point the satellite in real time, which is called tracking. This is done using two antenna motors which are slaved to the azimuth and elevation angles of the satellite relative to the ground station, these angles are calculated by GPREDICT.

The two ground station antennas and the two-engine block in the middle.
We have just modernized the original tracking system which was carried out using specific software (which had some limitations).
This improvement was made possible thanks to the addition of a server launched on one of the PC of the ground station and will act as a bridge between the GPREDICT software and the antenna motor controller.
This software is free and can be found on Hamlib (Ham Radio Control Library). We can now with a specific interface integrated into GPREDICT, manually control the motors and / or track.
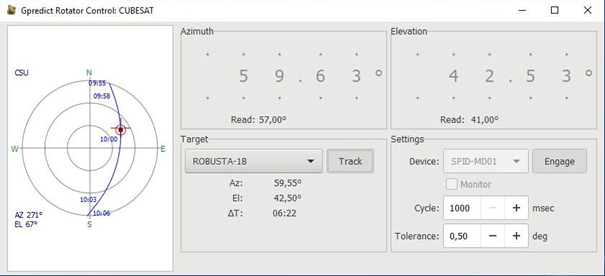
GPREDICT engine control interface.
With GPREDICT one can visualize the trajectory of the satellite (here ROBUSTA-1B), its position (the black circle) and the position of the antennas (the crosshair reticle). The angle setpoints calculated by GPREDICT are shown in large gray letters and in small black letters the actual angles returned by the antenna controller.
The second advantage of this system is that the server is accessible by the TCP / IP protocol. It is therefore possible to control the antenna remotely provided that you have GPREDICT on your PC.
from the ground station we can monitor the antennas in order to check their correct functioning thanks to a camera mounted on the roof.

Camera on the roof in the axis of the building pointed at the antenna mast (Geographic North)
For remote control and remote vision, therefore, an IP camera remains to be installed …
Article written by Daniel Kalinowski, head of the UPEC Space Campus ground station