Nouveau système de contrôle d’antennes à la Station Sol
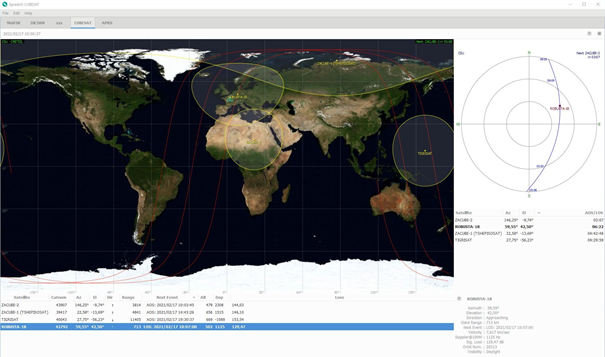
Ecran principal du logiciel GPREDICT.
Jusqu’à présent nous utilisions le logiciel de prédiction de passages de satellites GPREDICT uniquement pour préparer nos écoutes. A savoir : Heure précise à laquelle va passer un CUBESAT, la durée de son passage (en moyenne 10 minutes), sa position en Azimut et Elévation par rapport à la station sol.
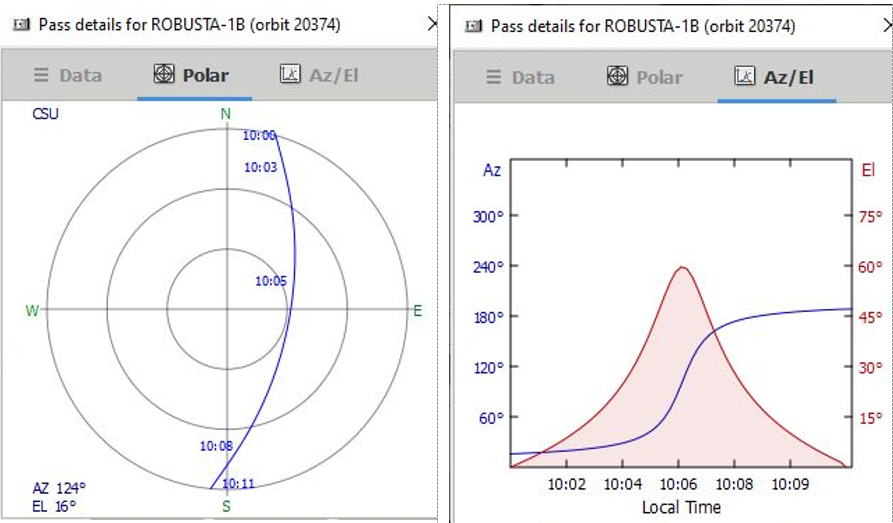
Diagramme polaire et angles d’azimut et d’élévation pour le passage d’un CUBESAT
Les CUBESAT étant en orbite basse entre 400 et 600 km d’altitude de type LEO (Low Earth Orbit), leur vitesse est très élevée de l’ordre de 27500 km/h soit 450 km/min ou 7,6 km/s. Une rotation autour de la terre se fait en 90 minutes environ et généralement selon un axe perpendiculaire à l’équateur. Il y a donc à peu près 16 rotations en 24h. Projeté à la surface de la terre, les passages se décalent à chaque fois de plusieurs milliers de km et il est donc possible d’en trouver que deux convenables par 24h. Un passage nord-sud à proximité de la station, puis 12 heures après lorsque la terre a fait un demi-tour, le même mais inversé à savoir sud-nord.

Traces de Passage CUBESAT ROBUSTA-1B.
Conclusion : Un seul passage de jour est écoutable. L’heure de ce passage est variable en fonction de l’année, matin ou midi ou soir et se décale chaque jour. Il est donc impératif de bien anticiper ce passage lorsqu’il a lieu.
Lors du passage, compte-tenu de la forte directivité de nos antennes, il y a lieu de pointer le satellite en temps réel, ce que l’on appelle tracking. Cela se fait à l’aide de deux moteurs d’antennes qui sont asservis sur les angles d’azimut et d’élévation du satellite par rapport à la station sol, ces angles étant calculés par GPREDICT.

Les deux antennes de la station sol et le bloc des deux moteurs au milieu.
Nous venons de moderniser le système de tracking d’origine qui s’effectuait à partir d’un logiciel spécifique et qui possédait quelques limitations.
Cette amélioration a été possible grâce à l’ajout d’un serveur lancé sur un PC de la station sol et qui va faire passerelle entre le logiciel GPREDICT et le contrôleur des moteurs des antennes.
Il s’agit d’outils logiciels libres se trouvant dans Hamlib (Ham Radio Control Library). Nous pouvons maintenant avec une interface spécifique intégrée à GPREDICT, faire le pilotage manuel des moteurs et/ou le tracking.
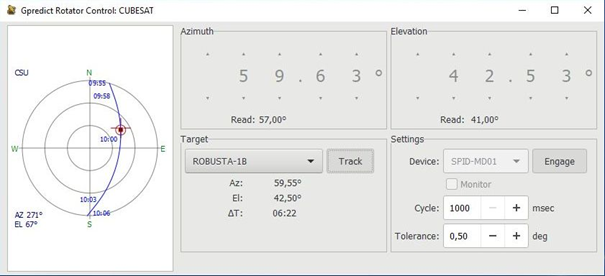
Interface de contrôle moteur de GPREDICT.
Très pratique, on peut visualiser la trajectoire du satellite (ici ROBUSTA-1B), sa position (le rond noir) et la position des antennes (le réticule en forme de croix). On voit en gros caractères grisés les consignes d’angles calculés par GPREDICT et en petit caractères noirs les angles réels retournés par le contrôleur d’antennes.
Le deuxième intérêt de ce système est que le serveur est accessible par le protocole TCP/IP. Il est donc possible à partir d’un poste distant sur lequel est lancé GPREDICT de faire ce contrôle d’antennes.
Dans la station sol nous avons une vision des antennes pour contrôler le bon fonctionnement du système grâce à une caméra montée sur le toit.

Caméra sur le toit dans l’axe du bâtiment pointée sur le mât d’antennes (Nord Géographique)
Pour le contrôle à distance et la vision à distance, reste donc à installer une caméra IP …
Article rédigé par Daniel Kalinowski, responsable de la station sol du Campus Spatial de l’UPEC