Maquette du rover ExoMars : la foreuse prend forme
Camille Petton et Nathan Menuat, deux étudiants de l’Icam site de Paris-Sénart impliqués dans le projet Rover du Campus Spatial UPEC
Après six mois de travail, l’intégration de la foreuse du véhicule d’exploration spatiale Rosalind Franklin a débuté grâce à Camille Petton et Nathan Menuat, étudiants ingénieurs à Icam site de Paris-Sénart.
« Il a fallu ruser et trouver des techniques pour imiter et se rapprocher le plus possible de la réalité. » Nathan Menuat a travaillé pendant six mois avec sa camarade Camille Petton à reproduire le plus fidèlement possible la foreuse du rover ExoMars, avec des composants facilement disponibles dans le commerce. Les deux ingénieurs de l’Institut Catholique d’Arts et Métiers (Icam) site de Paris-Sénart participent au projet pluridisciplinaire lancé par le Campus Spatial de l’UPEC (CSU). Avec des étudiants d’autres établissements d’enseignement supérieurs, ils prennent part à la construction de la maquette fonctionnelle en taille réelle du véhicule d’exploration spatiale Rosalind Franklin. Un défi ambitieux, qui leur offre l’occasion de se former aux métiers du secteur de l’aérospatial.
Le CSU souhaite utiliser la maquette construite par les étudiants pour expliquer le fonctionnement du rover Rosalind Franklin au grand public. Baptisé ainsi en hommage à la chimiste anglaise qui a joué un rôle central dans la découverte de la structure moléculaire de l’ADN, le véhicule d’exploration spatiale a été développé par l’Agence Spatiale Européenne et l’agence russe Roscosmos. Il aura pour mission de rechercher des traces de vie sur la planète rouge, à partir de 2023. Une date clé pour le CSU, qui s’est fixé pour objectif de déployer la maquette au moment de l’arrivée du véhicule d’exploration spatiale sur la planète rouge.
Le rôle central du « trépan »
Pour déterminer si de la vie a pu exister dans le passé sur Mars, le rover prélèvera des échantillons du sous-sol de la planète. La foreuse creusera ainsi jusqu’à deux mètres de profondeur, à une vitesse de cinq millimètres par minute. Chaque forage durera environ trois jours. « Mais notre maquette devrait pouvoir être aussi plus rapide, car elle a un but éducatif, précise Camille Petton. L’outil de forage rotatif, appelé trépan, tournera à 1200 tours/minute, et il descendra de cinq centimètres en quelques secondes. » Cette pièce mécanique sera actionnée par un moteur possédant une caractéristique singulière. « Il sera creux, ajoute Nathan Menuat. Un piston pourra entrer à l’intérieur pour pousser l’échantillon de matière dans le rover. » Fixé sur une plaque en acier, le moteur sera protégé par une pièce mécanique en tôle appelée « carter »: une enveloppe étanche qui permettra de préserver le mécanisme de la maquette.
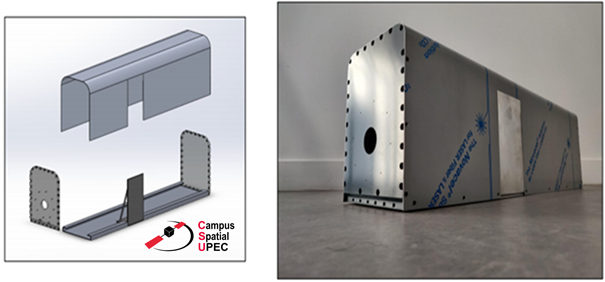
Pour reconstituer le plus fidèlement possible le rover ExoMars, Camille Petton et Nathan Menuat prévoient de recouvrir la tôle du carter par un revêtement qui simulera l’apparence extérieure du véhicule spatial de l’ESA. Ils ont aussi reproduit des pièces en modélisation 3D et ont acheté des câbles fictifs. Enfin pour simuler la surface martienne, les deux étudiants veulent utiliser du plâtre, car cette matière présente l’avantage d’être facile à forer.
Une foreuse piloté depuis internet
Les deux ingénieurs ont aussi travaillé à la reproduction des mouvements de la foreuse. « Tout d’abord elle se place à la verticale, puis se positionne au-dessus du lieu de forage, décrit Nathan Menuat. Sort ensuite un trépan. Il s’agit de l’outil de forage qui prélève un échantillon dans le sol et l’éjecte dans le corps du rover. Un broyeur transforme enfin l’échantillon en poudre, afin de pouvoir l’analyser. » Sur la maquette du rover, les mouvements de la foreuse seront pilotés depuis un poste de contrôle. Un ordinateur transmettra ainsi des ordres à des plateformes, qui commanderont des mouvements au moteur. Cinq actions seront possibles : monter et descendre la foreuse, monter et descendre le trépan, tourner la foreuse, tourner le trépan et pousser l’échantillon à l’intérieur du rover.
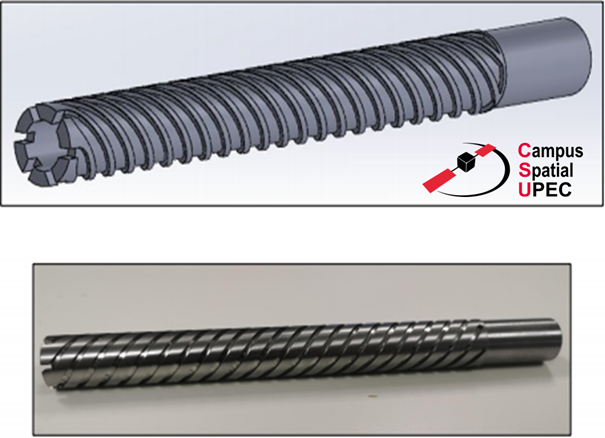
À l’issue de six mois de travail, quand on demande aux deux ingénieurs quel élément leur a posé le plus de difficultés, leur réponse est claire : le trépan. « On ne trouvait pas de modèle abrasifs aux bonnes dimensions, donc on a décidé de le produire sur-mesure, lance Camille Petton, en présentant l’outil de forage en acier composé de six dents. On a réalisé au moins cinq ou six essais afin d’obtenir la version actuelle. » Conçu par les deux étudiants, le trépan a ensuite été fabriqué par les élèves de l’école de production de l’Icam. Ces derniers construiront ensuite le corps du rover avec le troisième groupe d’ingénieurs de l’Icam chargé de travailler sur la maquette. La passation sera effectuée au début du mois de février 2021. « Les prochains étudiants continueront l’assemblage de la foreuse, conclue la jeune femme. On a prévenu l’école qu’il fallait qu’ils soient à l’aise avec le code, parce que cela représentera une partie importante du travail. » Avant Nathan Menuat et Camille Petton, un premier groupe d’élèves de l’Icam avait travaillé six mois sur la foreuse du rover, réalisant notamment d’importantes recherches bibliographiques.

La maquette fonctionnelle du rover Rosalind Franklin est un projet du Campus Spatial UPEC, co-financé par la Région Île-de-France dans le cadre de son programme de soutien à la diffusion de la culture scientifique, technique et industrielle (« La science pour tous ») et le CNES.
Article rédigé par Mathilde Pires (étudiante en journalisme au Centre de formation des journalistes (CFJ)) pour le Campus Spatial UPEC
Une réponse
Merci pour cet article très clair qui éclaire les novices en ingénierie, comme moi. C’est brillant !